

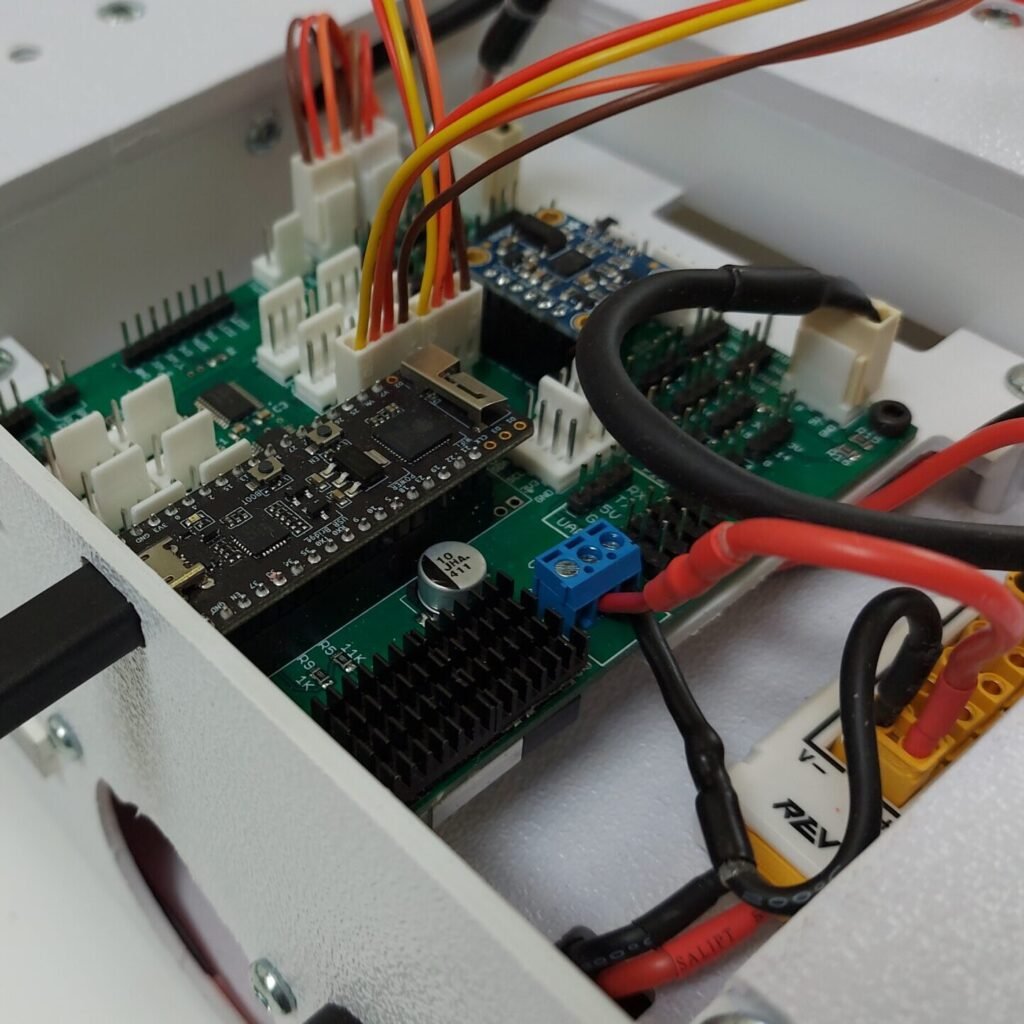
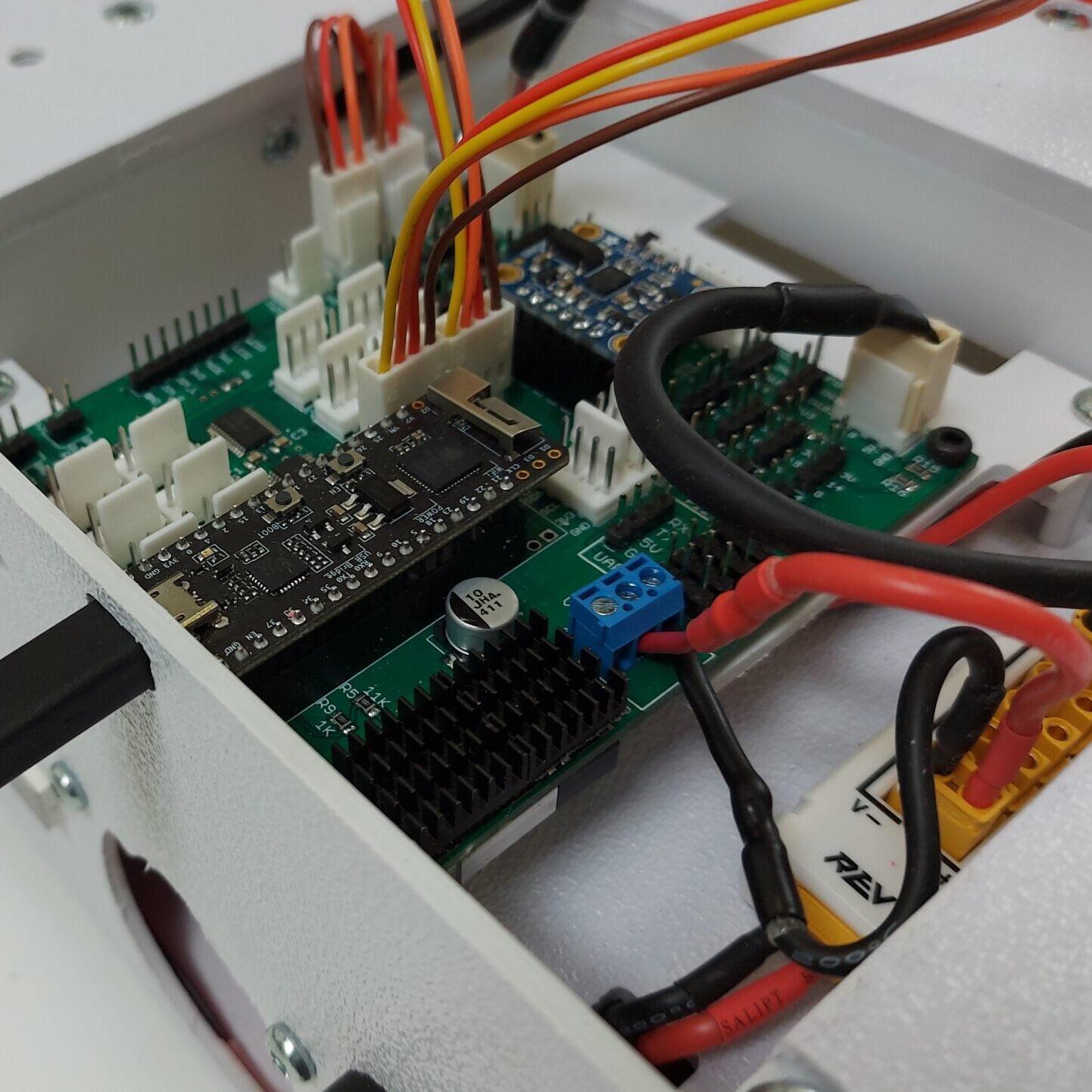
Expansion Capabilities
QBii Plus is equipped with various digital interfaces to enable expansion.
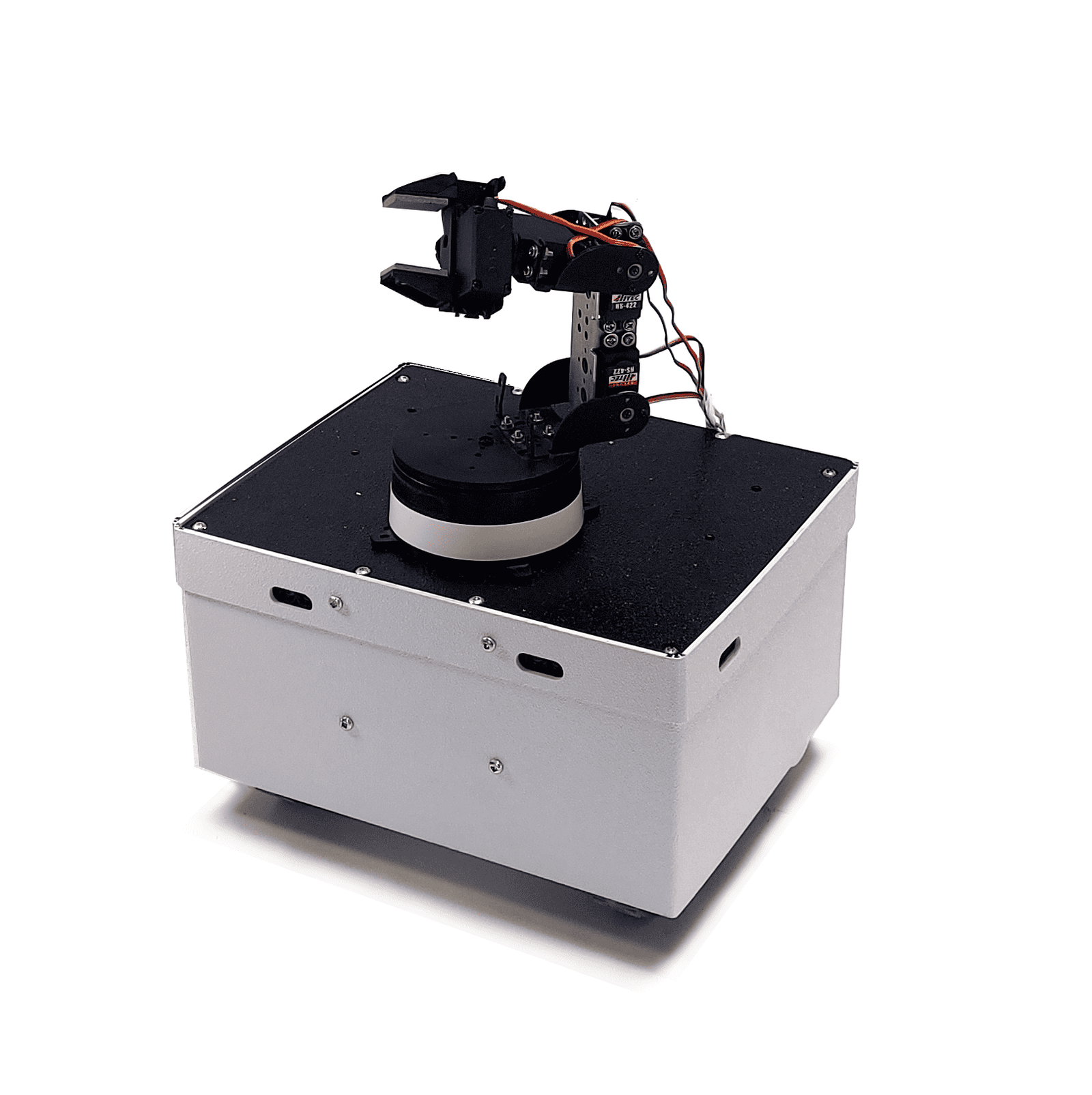
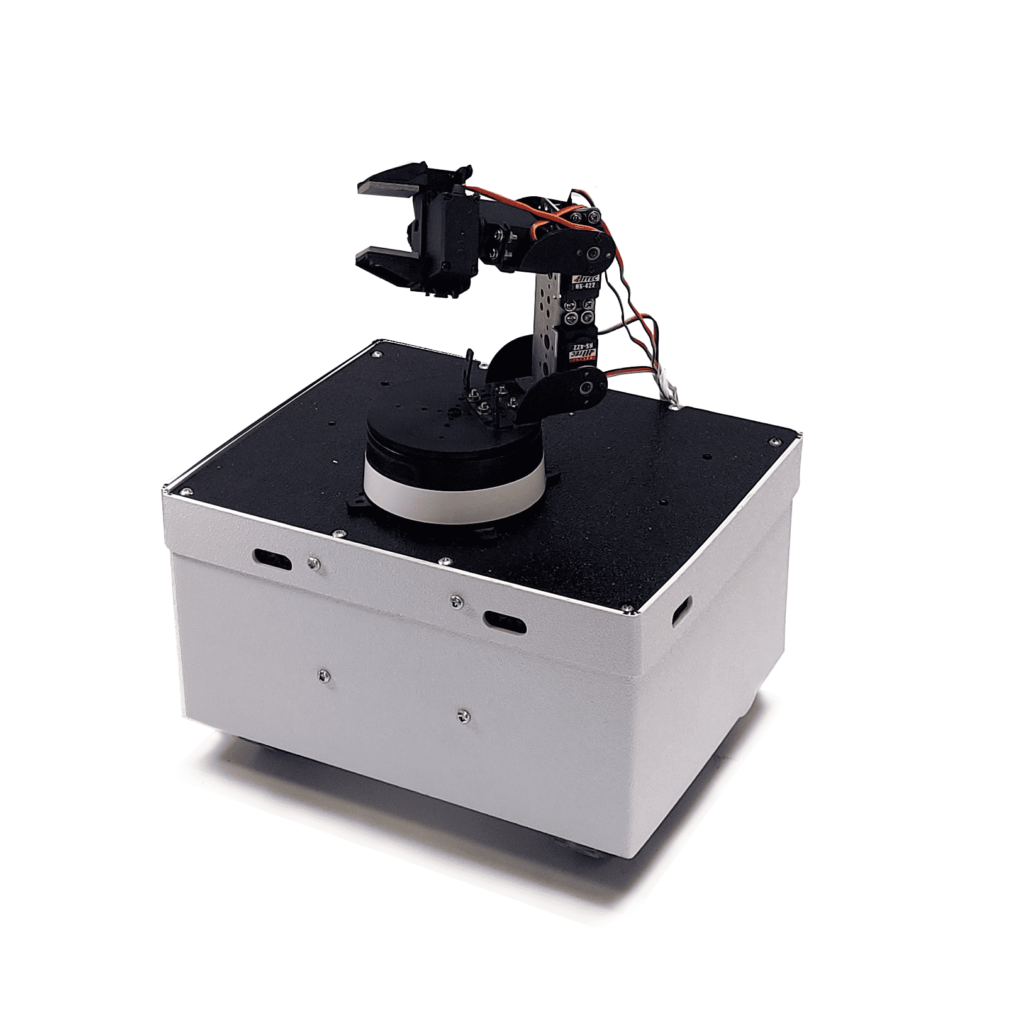
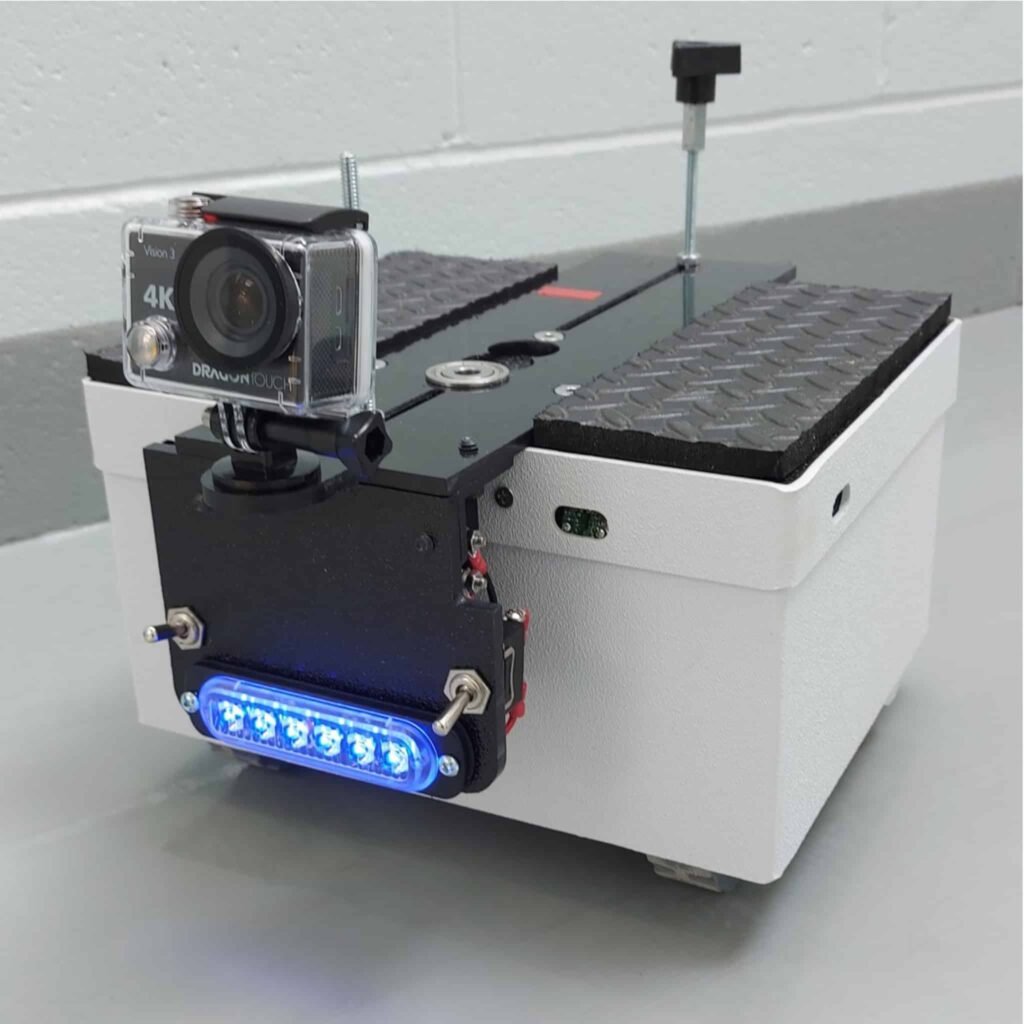
Custom Payloads
Use threaded holes on the robot's sturdy top plate to attach you own custom payloads.

ROS2 Compatible
A Raspberry Pi co-processor allows QBii Plus to operate within a ROS2 network